本帖最后由 CANFD 于 2025-11-3 22:20 编辑
一、引言
随着汽车保有量的持续攀升,消费者对汽车安全技术的要求也日益严格,特别是主动安全技术方面。如今,防抱死系统(ABS)、车身电子稳定系统(ESP)以及日益受到关注的高级驾驶辅助系统(ADAS)和汽车防撞预警系统(FCWS)等,都高度依赖轮速信息的准确获取。这些系统要么直接使用轮速传感器测得的当前轮速,要么通过汽车电子控制单元(ECU)对轮速信号进行逻辑处理来估算汽车速度。本文旨在深入剖析市场上主流轮速传感器的工作原理及其信号特征,并通过具体应用实例来展示其作用,同时展望轮速传感器技术的发展趋势。
二、轮速信号的采集
轮速信号的采集,实质上是对汽车轮轴旋转速度的测量。这一过程常采用的光电式、电涡流式和电磁式等转速测量方法,同样适用于汽车轮速信号的测量。在各种方法中,电磁式轮速传感器以其出色的工作稳定性、适中的价格,以及对环境因素如温度和灰尘的较强抵抗力,成为了轮速信号采集中的主流选择。
电磁式轮速传感器可进一步细分为电感式、霍尔式和磁阻式三种类型。其中,电感式轮速传感器作为被动式传感器,无需外部供电;而霍尔式与磁阻式轮速传感器则为主动式,需要外部电源供电以产生轮速信号,若供电中断,则无法输出轮速信号。
1、电感式轮速传感器
电感式轮速传感器,其工作原理基于电磁感应。它通过将车轮的运动转化为线圈自感系数和互感系数的变化,进而将这种变化转换为电压或电流的输出,从而实现了非电量到电量的转换。根据电磁感应定律,当回路中的磁通量发生变化时,会产生感应电动势,如公式(1)所示: 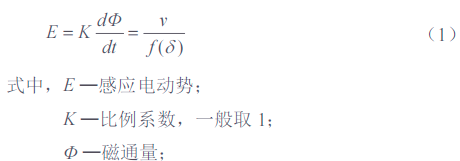
由公式(1)和(2)可知,感应电动势的输出与磁通量的变化紧密相关,而磁通量的变化频率则直接决定了感应电动势的输出频率。电感式轮速传感器的工作原理结构如示意图1所示
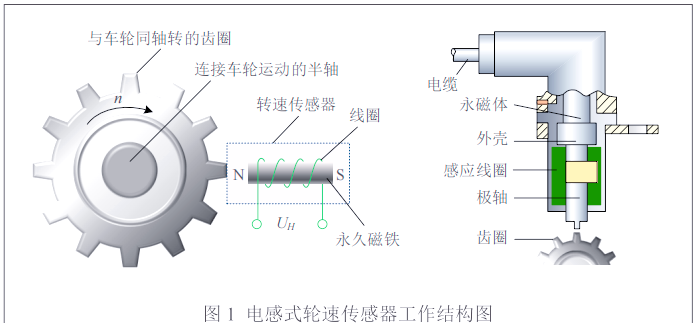
当车轮开始运动时,与之相连的齿圈会随之转动。这种转动会导致齿圈与永久磁铁之间的间隙发生变化,进而影响磁通量的多少。这种磁通量的变化会被感应线圈捕捉,并转化为感应电动势的变化。通过统计感应电动势的频率,我们就可以推算出车轮的转速。
P为系数,其值通常根据单位进行调整;f代表感应电动势的频率;而z则表示齿数。
2、霍尔式轮速传感器的工作原理
霍尔式轮速传感器是利用霍尔效应进行工作的。它主要由霍尔组件和电子元件精心构成。当霍尔元件置于与电流方向垂直的磁场中时,会在该元件的两端产生一个电势差,这个电势差被称为霍尔电势差。正是基于这个原理,霍尔式轮速传感器能够精确地测量轮速。
式中,I代表输入电流,B代表磁感应强度,n代表自由电子浓度,e代表电子电荷量,d代表霍尔元件厚度,KH代表霍尔系数,它定义了霍尔元件的灵敏度,且仅与元件材料相关,是一个常量。根据公式,当UH、I和B中的两个参数确定时,第三个参数也随之确定。需要特别留意的是,自由电子浓度n对温度变化非常敏感,因此必须采取措施消除温度变化所带来的影响。霍尔式轮速传感器的工作原理结构如图2所示。
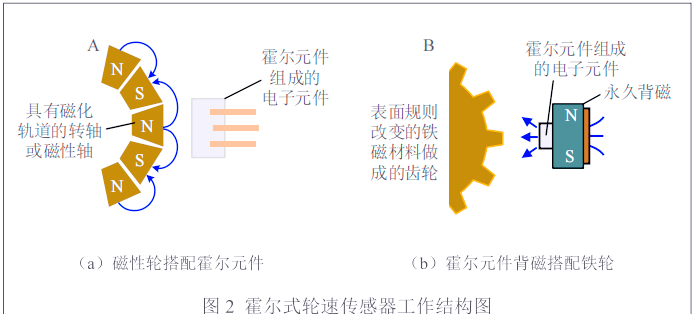
具有磁化轨道的转轴或磁性轴在旋转时,会产生一个磁场。同时,永久背磁会生成一个偏转磁场。这些磁场的变化可以被霍尔式轮速传感器捕捉到,进而转换为电信号。在车轮运动的过程中,编码器会随之转动,其磁通量的大小变化会被传感器精准地检测到。为了进一步提高检测的精度和灵敏度,传感器内部通常会安装两个霍尔元件,它们在运动过程中会产生具有一定相位差的波形。经过差分放大处理后,这些波形能够更准确地反映车轮的运动状态。此外,车轮的转速也可以通过霍尔电压的信号频率来计算,如式(3)所示。
3、磁阻式轮速传感器
可变磁阻式轮速传感器利用了磁阻效应。当电流通过一个与磁场成角度α设置的磁阻效应元件时,该元件(通常由铁磁材料制成,被称为韦斯磁畴)的电阻系数会发生变化。这种变化是由于磁场与电流夹角α的设置,导致元件不同方向上的磁通量变化率产生差异,进而影响了元件的电阻
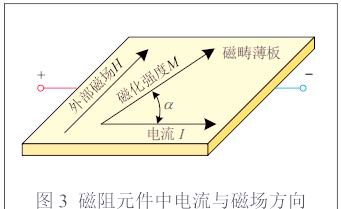
当外部磁场与磁阻元件中的电流夹角α发生变动时,磁阻元件的电阻R也会随之改变,具体关系如下
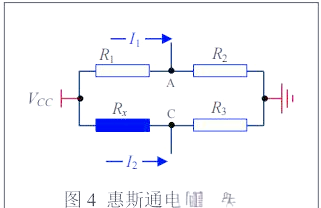
在图4中,我们可以观察到,当夹角α等于90°时,磁阻元件的电阻R达到最小值;而当夹角α为180°或0°时,其电阻R则达到最大值。通常,磁阻元件会与电桥电路相连以进行信号处理,例如惠斯通电桥。在电桥电路中,磁阻元件作为Rx,其阻值的变化会导致R1和R3两端的电压差ΔV发生变化。通过测量和利用这个电压差ΔV,我们可以实现对磁阻元件阻值变化率的放大。
与霍尔元件的信号处理相似,为了消除磁阻元件的零点漂移,我们可以采用差分处理的方法。通过在电路中增加磁阻元件并调整电桥结构,可以实现差分放大,其中六桥结构是常用的方法。此外,车轮转速的计算公式为式(3),其中f代表霍尔电压信号的频率。
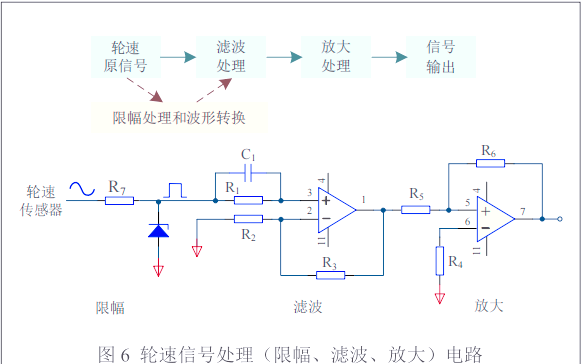
三、轮速信号的处理
在采集到轮速信号后,必须进行一系列的信号处理,包括限幅和滤波等操作,以确保汽车ECU能够接收到稳定且有效的轮速信息。
1、轮速信号的分类
在采集到轮速信号后,首要步骤是对其类型进行区分。轮速信号的输出类型主要分为以下四种,具体分类情况可参见图5 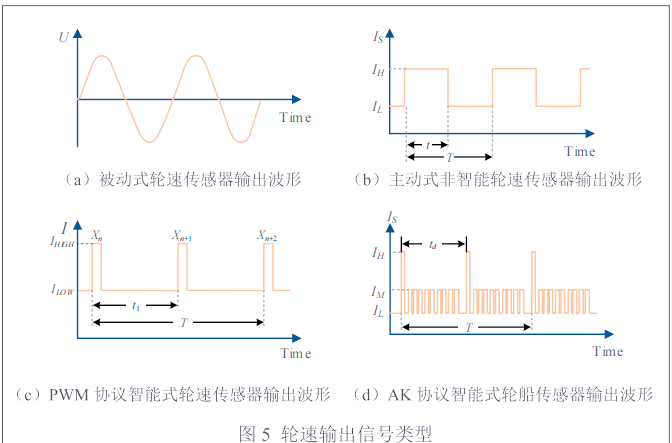
| 
 发表于 2025-11-3 22:14:05
发表于 2025-11-3 22:14:05